

科研进展
兰州化物所3D打印水凝胶基仿章鱼自适应粘/脱附吸盘研究获新进展
作为自然界的一类“界面工程大师”—章鱼,其吸盘结构依靠可形变的柔软肌壁精确调节腔内压力,既能在干湿环境、光滑与粗糙表面间迅速完成粘/脱附切换,又能精准控制吸附力大小,这种高度自适应特性使其在水下抓取、生物医疗等场景中具备不可替代的优势。顺应机器人技术、生物工程与柔性电子等领域的快速发展,构建具有章鱼吸盘式功能的仿生粘附器件,已成为破解传统刚性粘附设备(如真空吸盘、电磁吸盘)在复杂界面适应性差、且易损伤脆弱目标(如生物组织、精密零件)等痛点的关键路径。
尽管仿生章鱼吸盘研究取得一定进展,但仍面临两项关键技术瓶颈。其一,传统制备工艺(如模压、浇铸成型)难以精准复刻天然吸盘复杂的多尺度层级微结构(如多级褶皱、微通道阵列),由此导致仿生吸盘的界面适形性不足、流-固耦合调控受限等问题;其二,现有材料体系多采用单一模量的刚性或弹性基体,难以实现类似章鱼吸盘肌壁的高柔韧性与可控形变的协同,因而在动态粘附过程中易出现粘附力衰减、能量耗散偏高及脱附响应时滞等问题。尤为关键的是,在深海探索等高压高盐液体环境中,传统吸盘材料长期在水下环境中使用易造成粘附与力学性能易衰减等环境鲁棒性不足等问题,制约了其在水下机器人抓取与操作、水下爬壁与定点作业等场景中的可靠应用。
近日,中国科学院兰州化学物理研究所润滑材料全国重点实验室3D打印摩擦器件组提出了一种仿生策略来解决上述问题。研究人员首先通过强、弱氢键协同作用及微相分离策略制备了一种具有可调机械性能和界面刚度适应性的超分子水凝胶。随后,又结合光固化3D打印技术设计构建了一种具有可切换粘附性能的水凝胶仿生吸盘,该吸盘结构主要由可调曲率膜(调节吸盘脱附过程)、负压腔和气动腔室组成。此外,所设计的具有不同曲率膜的水凝胶吸盘对硅、玻璃、S304和尼龙等各种粗糙表面均具有自适应粘/脱附性。
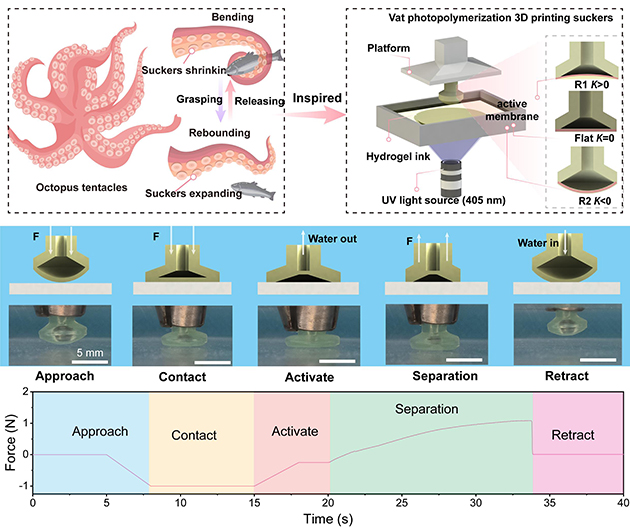
图1. 受章鱼启发的自适应水凝胶吸盘的设计制造示意图。
为进一步凸显非破坏性粘附的实用性,研究人员研制了一款采用液压驱动、配备仿生吸盘的水凝胶夹持器,可自适应地操纵各种水下物体,不仅能应对曲面复杂的物体,甚至还能温和处理蛋黄、豆腐块等极为脆弱的食品。 此外,研究人员将这类水凝胶吸盘阵列结构集成到水下无人航行器的腹部和六足机器人的足端,从而赋予其水下操控物体、定点停留及表面爬行等特殊功能,为复杂海洋环境场景中的应用提供了高适形、可逆、低损的粘附手段。
上述研究深化了仿生吸盘在长期耐久性与稳定性、强韧力学性能平衡、极端环境适应性等方面的创新进展,为功能性仿生水凝胶吸盘在复杂工程场景中的应用奠定了基础,有望显著推动其在海工运维、机器人操作和深海勘探等高端工程应用中的发展。
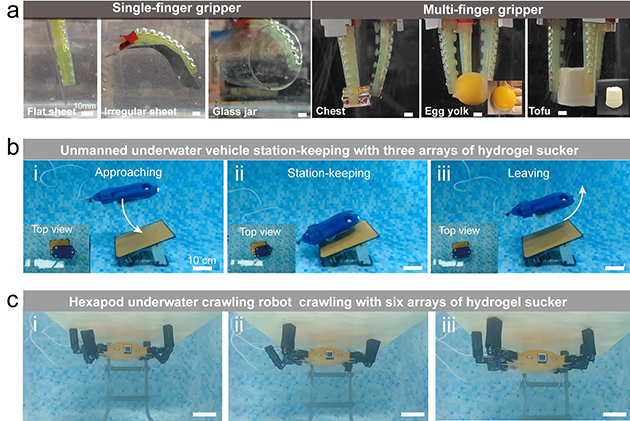
图2. 自适应水凝胶吸盘在水下场景中的多功能演示。



图3. 3D打印水凝胶吸盘结构在水下场景中的应用展示。
相关研究工作以“Octopus-Inspired Self-Adaptive Hydrogel Gripper Capable of Manipulating Ultrasoft Object”为题发表在Nano-Micro Letters(Nano-Micro Letters,2026,18: 33;https://doi.org/10.1007/s40820-025-01880-4)上。石河子大学联培博士生汪祎贤为论文第一作者,石河子大学贾鑫教授、兰州化物所刘德胜助理研究员和王晓龙研究员为共同通讯作者。
上述研究工作得到了国家重点研发计划、中国科学院战略性先导专项(B类)、国家自然科学基金、甘肃省科技计划、中国科学院特别研究助理资助项目等项目的资助。





